[1] Jia Deng, Wei Dong, Richard Socher, Li-Jia Li, Kai Li, and Li Fei-Fei. Imagenet: A large-scale hierarchical
image database. pages 248–255, 2009.
[2] Leon A. Gatys, Alexander S. Ecker, and Matthias Bethge. A neural algorithm of artistic style. CoRR,
abs/1508.06576, 2015.
[3] Diederik P. Kingma and Jimmy Ba. Adam: A method for stochastic optimization, 2014. cite
arxiv:1412.6980Comment: Published as a conference paper at the 3rd International Conference for Learning
Representations, San Diego, 2015.
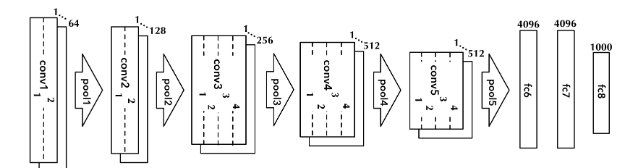
[4] Karen Simonyan and Andrew Zisserman. Very deep convolutional networks for large-scale image recognition.
In Yoshua Bengio and Yann LeCun, editors, 3rd International Conference on Learning Representations,
ICLR 2015, San Diego, CA, USA, May 7-9, 2015, Conference Track Proceedings, 2015.
[5] Dmitry Ulyanov, Vadim Lebedev, Andrea Vedaldi, and Victor S. Lempitsky. Texture networks: Feed-forward
synthesis of textures and stylized images. CoRR, abs/1603.03417, 2016.



1 comment so far